
Isesõidukid – kes juhib, kes vastutab?
Pakirobotid jäävad Eesti teedel ainsateks autonoomselt liikuvateks sõidukiteks seni, kuni vajalikud õigusmõisted ja tehnilised nõuded tuuakse sisse Eesti õigusruumi. Samuti vajab õigusruum normi tehisintellekti kui suure ohu allika kohta ja soovitavalt ka võimalust end suure ohu allika valdajana kindlustada.
Isejuhtivad sõidukid on juba aastakümneid tundunud olevat tohutu suure läbimurde lävel – ometi on ainsad sõidukid, mis Eestis meie igapäevaelus autonoomselt sõidavad, tarnerobotid ja kaks iseAutot (TalTechi väikebussid). Kas tõesti on õiguslikud takistused need, mis hoiavad isejuhtivaid sõidukeid meie teedelt eemal – kui jah, siis kas ilmselt ebapiisav õiguslik raamistik on Eesti või üldine probleem? Ja kuidas on lood vastutusega?
Milleks isejuhtivad sõidukid?
Mõned mootorsõidukite funktsioonid on juba aastakümneid olnud kõrgel tasemel automatiseeritud: paljud olemasolevad sõiduohutus- ja juhiabisüsteemid, nagu ABS (pidurite blokeerimisvastane süsteem), ESP (elektrooniline sõidustabiilsuse programm), sõiduraja hoidmise abisüsteem või kohanduv püsikiiruse hoidik (ACC), on väärtuslikud abimehed, mis ei ole mitte ainult sõitmist mugavamaks muutnud, vaid on ka oluliselt vähendanud liiklusohvrite arvu Eestis ja mujal. Need tagavad sõidustabiilsuse kriitilistes olukordades või hoiavad eessõitva sõidukiga automaatselt vahemaad.
Praeguseks on tehnoloogia areng juba saavutanud kriitilise taseme, mis on vajalik selleks, et auto saaks sõita täiesti autonoomselt. Täpsemalt on nii Rahvusvaheline Standardiorganisatsioon (ISO) kui ka Autoinseneride Liit (SAE) töötanud välja autonoomse sõidu kuue taseme standardid, mis ulatuvad „automaatse juhtimise puudumisest“ (tase 0) kuni „täieliku automatiseerimiseni“ (tase 5)1 .
Termin „isejuhtivad sõidukid“ viitab tavaliselt ISO/SAE 4. või 5. tasemele, kus automatiseeritud juhtimissüsteem ADS (ingl automated driving system) täidab kõiki dünaamilise sõidu ülesandeid igal ajal ja igas aspektis (ISO/SAE 4. taseme korral igas aspektis), ilma et kasutaja peaks sekkuma:
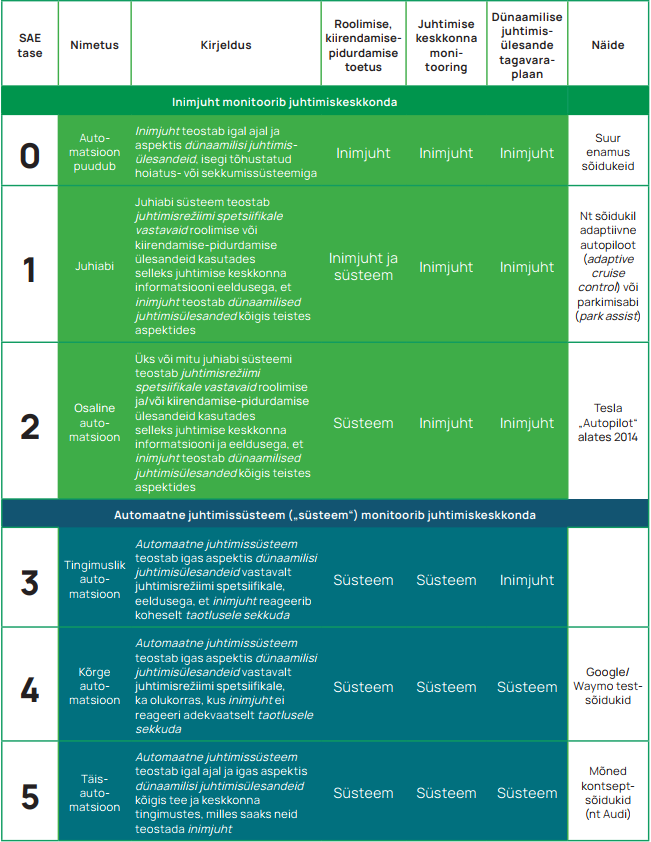
Allikas: Turk ja Pild, Analüüs SAE tase 4 ja 5 sõidukite kasutusele võtmiseks, 2017, lk 2318
Lisaks andurite ja andmetöötluse pidevale täiustamisele sõiduki juhtimisseadmetes saavutatakse selline automatsioon ka sõidukivälise võrgustiku abil: autodevaheline „Car-to-Car“ võrgustik ühendab sõidukid liikluses, autode ja infrastruktuuri võrgustik „Car-to-Infrastructure“ ühendab andmevahetuse kaudu väliseid rajatisi nagu liiklusfoorid, liikluskorraldussüsteemid ja seiresüsteemid. Mõlemad koos parandavad oluliselt liiklusvoogu, sest võrgustunud sõidukid saavad automatiseerituna liikuda palju sujuvamalt kui siis, kui neid juhivad üksikisikud, kelle tähelepanu, juhtimisstiil, teadmised kohalikest oludest või sõiduoskused on sageli väga erinevad. Need sünergiad on kasulikud ka keskkonnale, sest sujuv liiklus säästab hulga kütust, kuna väheneb sage pidurdamine.
Lisaks sellele suudavad integreeritavad sõiduabisüsteemid tulevikus järk-järgult üha enam analüüsida ka sõidukijuhi käitumist, koostada tema sõiduprofiili ja kohandada täisautomaatse sõiduki sõiduviisi vastavaks juhi kavatsustele. Liikumismustrite analüüs võimaldab prognoosida teiste liiklejate käitumist, mis on eriti oluline jalakäijate kaitse seisukohast2.
Õiguslikud tõkkepuud varisevad kogu maailmas
Oma arvukate eeliste tõttu on täisautomaatsed sõidukid ka poliitiliselt soovitud ja õiguslikke takistusi hakatakse üha enam kõrvaldama. Näiteks nii 1949. aasta Genfi teeliikluse konventsioon kui ka 1968. aasta Viini maanteeliikluse konventsioon pole seni hõlmanud autonoomseid sõidukeid, nõudes inimjuhi olemasolu, kes on võimeline kontrolli üle võtma. Antud küsimusega tegeleb ÜRO Euroopa Majanduskomisjoni (UNECE) sõidukeid käsitlevate eeskirjade ühtlustamise ülemaailmse foorumi välja töötatud Viini konventsiooni hiljutine muudatus. See jõustub sel kevadel ning seisneb uue artikli 34a lisamises, mille kohaselt loetakse juhi nõue „täidetuks“, kui sõiduk kasutab automatiseeritud juhtimissüsteemi (ADS), mis vastab riiklikele tehnilistele eeskirjadele.
Sõidukite rahvusvaheliste tehniliste eeskirjade osas on sel kevadel jõustunud kolm uut ÜRO eeskirja ühendatud ja automatiseeritud juhtimise valdkonnas:
- ÜRO eeskiri nr 155 küberturvalisuse ja küberturvalisuse haldussüsteemide kohta;
- ÜRO eeskiri nr 156 tarkvarauuenduste ja tarkvarauuenduste haldussüsteemide kohta;
- ÜRO eeskiri nr 157 automatiseeritud sõiduraja hoidmise süsteemide (ALKS) kohta.
Liikuvuse tulevik. Arengusuundumused aastani 2035
Liikuvus ja liikumisvõimalused on tihedalt seotud sellega, kus ja kuidas me oma elusid elame. Liigutakse, et käia tööl, õppida või veeta vaba aega. Liikuvuse tulevikku saab vaadata nii laiemas tähenduses ehk mõeldes inimeste elamismustrite ja paiknemise peale kui ka kitsamalt ehk igapäevaste liikumisvalikute mõttes olemasoleva asustussüsteemi tingimustes.
Sarnased muudatused leiavad aset ka Euroopa seadusandluses. 2021. aasta detsembris esitas Euroopa Komisjon kõigile Euroopa Liidu liikmesriikidele nn EL-i „automatiseeritud juhtimissüsteemi“ ehk ADS-määruse eelnõu4. Määruse eelnõus on muu hulgas sätestatud autonoomsete sõidukite tüübikinnituse eeskirjad seoses nende automatiseeritud juhtimissüsteemiga. EL-i ADS-määrus täiendab määrust 2019/2144 mootorsõidukite tüübikinnituse kohta, mis on samuti üsna uus ja jõustub 1. juulil 2022 ning mille artikli 3 lõikes 22 on juba määratletud „täielikult automatiseeritud sõidukid“, aga sisuliselt see veel neid või nende kasutamist ei reguleeri. Sellepärast kehtestatakse ADS-määrusega EL-i esimene automatiseeritud ja täielikult automatiseeritud sõidukitele kohalduv õigusraamistik.
EL-i liikmesriikidest on näiteks Saksamaa vastu võtnud uue autonoomset sõitu käsitleva seaduse, mis jõustus 28. juulil 2021 ja millega muudeti Saksamaa liiklusseadust5. 2017. aastal Saksamaal kehtestatud õigusnormid6 lubasid varem ainult tavapärast juhtimist kuni ISO/SAE 3. tasemeni, st juht jäi alati sõiduki juhiks isegi siis, kui kasutati kõrg- või täisautomaatseid juhtimisfunktsioone. Juht pidi olema valmis igal ajal juhtimist üle võtma, kui seda vajalikuks peeti või kui süsteem teda selleks üles kutsus. Saksamaa uus autonoomset juhtimist käsitlev seadus ei nõua enam juhi olemasolu ja lubab seetõttu „autonoomseid juhtimisfunktsioone“ kuni ISO/SAE 4. tasemeni, et neid saaks kasutada tavatoiminguteks kindlaksmääratud kohtades (nt maanteel).
Tehnoloogia ja õiguse praeguses seisus ei saa veel eeldada, et sõiduki võib suures osas jätta selle enese hooleks.
Thomas Hoffmann
Ka Jaapani valitsus on astunud sammu lähemale täielikult autonoomse sõidu lubamisele, võttes vastu seaduseelnõu, mis muudab juhita autod seaduslikuks. Eeldusel, et eelnõu jõustub järgmisel aastal, hõlbustab see plaane pakkuda mehitamata isesõitvaid sõidukeid eakate inimeste transpordiks hõredalt asustatud maapiirkondades. Juhita sõidukeid pakkuvatelt ettevõtetelt oodatakse siiski, et nad kaugjälgiksid oma sõidukite kasutamist. Probleemi tekkimise või halvimal juhul õnnetuse korral peavad nad saatma kohale töötajad, kes tegelevad tagajärgedega7.
Iisraelis on vastu võetud regulatsioon, mis lubab ettevõtetel katsetada Iisraeli teedel autonoomset ühistransporti ehk juhita taksosid. Transpordi- ja liiklusohutuse ministeeriumi esitatud kaasnev seaduseelnõu on juba läbinud teise ja kolmanda lugemise ning reguleerib küsimusi nagu kindlustus ja erinevad load. Samuti luuakse sellega järelevalveorganid ja nõuandekomitee, kuhu kuuluvad asjaomaste sidusrühmade esindajad8.

USA-s arendatakse isejuhtivaid veokeid
2021. aasta detsembris lõpetas USA autonoomsete veokite startup TuSimple esimese testimise avalikel teedel, vahendab TechCrunch. Isejuhtivate veokite kasutusele võtmisest oodatakse õnnetuste ja kulude vähenemist ning lahendust tööjõupuudusele. USAs hukkus näiteks 2018. aastal veokitega seotud õnnetustes ligi 5000 inimest.
Automaatsed veokid hoiaksid hinnanguliselt kokku kümnendiku kütusest ja aitaksid sellega oluliselt vähendada kulusid. Isejuhtivate veokitega püütakse lahendada ka tööjõupuudust – kui kokku on USA-s ligi 800 000 veokijuhti, siis hinnanguliselt on puudu veel ligi 48 000. Maailma Majandusfoorumi andmetel on isejuhtivad veokid ka tõhusamad – kui isejuhtiv veok hakkab sõidus olema keskmiselt 78% ajast, siis juhiga veokid vaid 29%.
Ka USA on olnud väga aktiivne selle küsimuse reguleerimisel: näiteks 2022. aasta märtsi alguses andis USA riiklik liiklusohutuse amet (NHTSA) välja eeskirjad, millega kaotatakse nõue, et automatiseeritud sõidukite tootjad peavad varustama täisautonoomsed sõidukid käsitsijuhtimise seadmetega, et täita kokkupõrke vältimise standardeid. See samm oli vastuseks General Motorsi ja selle isesõitva tehnoloogia üksuse Cruise 2022. aasta veebruaris NHTSA-le esitatud avaldusele, milles paluti luba ehitada ja kasutusele võtta isesõitev sõiduk ilma inimestele mõeldud juhtimisseadmete, näiteks rooliratta või piduripedaalideta9. Ameerika Ühendriike peetakse autonoomsete sõidukite toetamisel ülemaailmselt juhtivaks, kuid mitte niivõrd eesrindliku reguleerimise tõttu, vaid pigem seetõttu, et enamik isejuhtivate sõidukite tootjate peakortereid asub USA-s ning ka enamik selle valdkonna patentidest on esitatud USA-s10.
Kogu Eestis on alates 2017. aasta märtsist isejuhtivate sõidukite testimine kõikidel avalikel teedel seaduslik11, kuid seda vaid tingimusel, et autol on juht, kes saab vajaduse korral kontrolli sõiduki üle enda kätte võtta – st vajalik regulatsioon on olemas kuni ISO/SAE tasemeni 312. 2018. aasta suvel tõi Tallinna Tehnikaülikool (TalTech) avalikkuse ette ülikoolis arendatud isejuhtiva sõiduki iseAuto, milliseid praeguseks on valmis saanud juba kolm13. Maanteeamet on 2020. a avaldanud üksikasjaliku isejuhtivate sõidukite tehnoloogia teekaardi14.
Autonoomse sõiduga seotud vastutus Eestis: praegune olukord
Põhimõtteliselt15 ei mõjuta automatiseeritud mootorsõiduki kasutamine ohvri vastutust käsitleva õiguse kohast kaitset. Kahjustatud isiku nõuded on kaetud mootorsõiduki valdaja (VÕS § 1057) ja tootja (VÕS § 1061) range vastutusega ja otsese nõudega mootorsõiduki kindlustusandja vastu (LKindlS § 23), sõltumata sellest, kas sõiduk on tavaline või isejuhtiv.
Pärast ohvrile kahju edukat hüvitamist (nt valdaja või kindlustuse poolt) tekib enamasti küsimus, kas, kellelt ja missuguses ulatuses on valdajal või kindlustusel hüvitisnõuded kolmandate isikute vastu – kindlustusel näiteks juhi vastu (LKindlS § 53) või valdajal tootja vastu. Kui konkreetse juhtumi puhul pole vastutuse jagamine müüja ja ostja vahel sõlmitud lepingus välistatud (sageli lepingu tüüptingimuste alusel), vastutab ka müüja ostja ees müüdud toote vea eest.
Kuna mootorsõidukijuhi käitumisega seotud kohustused automatiseeritud juhtimise ajal ei ole selgelt reguleeritud, valitseb märkimisväärne õiguskindlusetus.
Thomas Hoffmann
Tootja vastutus valdaja ees ei tekita SAE 3. taseme sõidukite puhul suuri probleeme, sest VÕS § 1061 jj katavad põhimõtteliselt ka isejuhtivate sõidukite ja nende komponentide defektid, disaini- ja turustusvead. Tootja või müüja asukoht välismaal võib raskendada õiguskaitset, kuna rahvusvahelise eraõiguse alusel saab juhtuda, et tootja või müüja vastutab oma asukohariigi õigussüsteemi järgi. Kuid nad vastutavad siiski sageli ka Eesti kohtute ees, eelkõige siis, kui hageja on tarbija.
Kuna mootorsõidukijuhi käitumisega seotud kohustused automatiseeritud juhtimise ajal ei ole selgelt reguleeritud, valitseb märkimisväärne õiguskindlusetus, mis võib mõjutada ka vastutusõigust, näiteks kaasneva hooletuse ja tegevusriski kaalumisel. Seepärast on mootorsõidukijuhil soovitatav, vähemalt seni, kuni kohtupraktika ei anna selgitust, pidada ka automatiseeritud töötamise ajal liiklusolusid silmas nii, et ta saaks kohe juhtimise üle võtta, kui tekib olukord, millega süsteem ei pruugi hakkama saada. Tehnoloogia ja õiguse praeguses seisus ei saa veel eeldada, et sõiduki võib suures osas jätta selle enese hooleks.
Täisautomatiseeritud sõiduga seotud vastutus Eestis
Eestis puudub siiani automatiseeritud sõidu õiguslik reguleerimine tasemetel 4–5. Täisautomatiseerimine mõjutaks kehtivat vastutussüsteemi eelkõige tootjavastutuse korral: mida rohkem sõidukeid automatiseeritud režiimil juhitakse, seda enam lasub vastutus lõpptulemusena tootjal, mitte sõidukis istuval inimesel (operaatoril) või valdajal16. Siinjuures tuleks märkida, et „operaator“ (nt juhiistmel istuv) on isik või robot, st ta ei ole enam juht, kes omaks tegelikku kontrolli, vaid käitab isejuhtiva sõiduki autonoomset tehnoloogiat.
Sarnaselt 3. tasemega annaks juba kehtiv õigus ka 4. või 5. taseme sõiduki juhtimisel tekkinud liiklusõnnetuses alati kannatanule tekitatud kahjude hüvitamise võimaluse: endiselt kehtivad VÕS § 1057 valdaja, VÕS § 1061 tootja ja LKindlS § 23 kindlustusandja vastutuse alused. Kui pärast kannatanule kahjude hüvitamist selgitatakse, kes kannab konkreetsel juhul lõplikult õnnetusjuhtumi kulud, tekib oht, et sõiduki operaator süüdistab õnnetusjuhtumi toimumises sel hetkel automaatselt sisse lülitatud süsteemi, kuigi õnnetus oli tegelikult tema põhjustatud – näiteks kui operaator ei jälginud selgeid juhiseid, võttis juhtimise õnnetuse hetkel aktiivselt üle, või vastupidi, jäi hoopis passiivseks, kuigi süsteem palus, et operaator võtaks juhtimise üle.
Eestis arendatakse autonoomseid busse
Esimesed iseliikuvad bussid jõudsid Tallinna tänavatele Eesti Euroopa Liidu Nõukogu eesistumiseks 2017. aastal. Samal aastal alustasid Eesti esimest iseliikuvat sõidukit arendama Taltech ja Silberauto. 2021. aastal esitles Auve Tech isejuhtivat muuseumibussi, mis hakkab vedama külastajaid Tartu kesklinnast Eesti Rahva Muuseumisse.
Auve Tech töötab välja teise generatsiooni autonoomset sõidukit, mis vastab 4. taseme autonoomsusele. See tähendab, et isejuhtiv sõiduk suudab opereerida ilma pardal oleva operaatorita, kes selle asemel jälgib kaugjuhtimise teel korraga umbes 10 sõidukit, et vajadusel sekkuda. 2023. aasta kevadeks peaks Auve Techi isesõitev sõiduk olema valmis väikesemahuliseks seeriatootmiseks ja kommertsialiseerimiseks.
Sellise olukorra vältimiseks on soovitav paigaldada kõrg- ja täisautomatiseeritud sõidukitele satelliitnavigatsioonisüsteemil põhinev „must kast“ (ingl blackbox), mis salvestab, millal automatiseeritud sõiduki juhtimine sisse lülitati ja millal süsteem palus juhil sõiduki juhtimine üle võtta, ja võiks ka kaaluda selle paigaldamise kohustuslikuks muutmist.
Kindlustussüsteemi osas suuri muudatusi teha pole vaja, aga vastutavad isikud (välja arvatud juba kindlustatud valdajad), nagu tootjad ja müüjad, võiksid saada sõlmida lisakindlustuse, mis võtab tehisintellekti arvesse suure ohu allikana ja mis võiks olla riigi poolt standardina välja töötatud. Variant oleks ka riiklik kindlustusfond või – sarnaselt liikluskindlustusega – peaks kõigil tehisintellekti eest vastutavatel isikutel olema kohustus oma toode suure ohu allikana kindlustada.
Eetilised dilemmad ja andmekaitse tähtsus
Lisaks õigusküsimustele tekitavad 4. ja 5. taseme süsteemid ka mitmeid eetilisi küsimusi (2): kui inimjuht reageerib erandlikes olukordades instinktiivselt, siis autonoomne sõiduk otsustab fikseeritud algoritmide alusel ja kõiki tegureid arvesse võttes. Seetõttu loodavad tootjad, et autopiloodid vähendavad oluliselt õnnetuste arvu võrreldes inimjuhtidega. Kuid kuidas peab see automaatne otsustamine olema eelprogrammeeritud, et tulla toime äärmuslikus olukorras, kus peaks näiteks kaaluma kahe vältimatu õnnetuse vahel, millega kummalgi juhul kaasnevad kehavigastused?
Juba sõiduki arendamise käigus tuleks kindlaks teha, kuidas sõiduk sellisel juhul „otsustab“. Tegelikud dilemmat tekitavad otsused – näiteks otsus üks inimelu versus teine inimelu – sõltuvad aga konkreetsest tegelikust olukorrast, sealhulgas mõjutatud isikute ettearvamatust käitumisest. Seega ei ole need selgelt standardiseeritavad ega kahtlemata ka eetiliselt programmeeritavad. Tehnilised süsteemid tuleb projekteerida õnnetuste vältimiseks, kuid neid ei saa standardiseerida õnnetuse tagajärgede kompleksseks või intuitiivseks hindamiseks selliselt, et nad võiksid asendada või ennetada vastutustundliku ja moraalse otsustusvõimega juhi otsust. Jääb üle vaid kujundada tehnoloogiat vastavalt tehnika seisule nii, et kriitilisi olukordi üldse ei tekiks.
GDPR-i alusel tuleb kõigepealt tehniliselt tagada, et sõidukite vahel või sõidukite ja transporditaristu vahel ei vahetataks isikuandmeid. Kuid isegi kui vahetatakse ainult nii palju anonüümseid andmeid kui minimaalselt vajalik, võib kõikide sõidukite täielik võrgustamine ja tsentraalne juhtimine digitaalse liiklusinfrastruktuuri raames olla eetiliselt küsitav, kuna ja kuivõrd see ei saa kindlalt välistada liiklejate täieliku jälgimise ja sõidukite juhtimisega manipuleerimise ohtu – seda eriti siis, kui võtta arvesse, et kõikehõlmav andmevahetus Smart City raames hägustab isikuandmete ja muude andmete, mis ei ole isikuandmed, erinevust17.
Kokkuvõte ja väljavaated
Kuna Eesti liiklusõnnetuste vastutuse süsteem näeb ette sõiduki valdaja range vastutuse, vastutab valdaja oma sõiduki eest põhimõtteliselt ka siis, kui ta on selle juhtimise täisautomatiseerinud ehk autonoomsele süsteemile loovutanud. See on oluline ka isejuhtivate sõidukite puhul, kuna hagejal on tavaliselt lihtsaim esitada nõue valdaja vastu, isegi kui tegelikult vastutab õnnetuste korral enamasti ka tootja, sest need on põhjustatud tehnilistest probleemidest.
Praegune Eesti õigusraamistik ei hõlma veel 4. ja 5. taseme automatiseeritud sõidukeid ning Eestis puuduvad mitmed vajalikud õigusmõisted. Esimese sammuna tuleks defineerida isejuhtivad sõidukid just rahvusvahelise standardi ISO/SAE kuue taseme kohaselt.
Kuna isejuhtivate sõidukite vastutust käsitlevad küsimused (nt endise sõidukijuhi „operaatoriks“ ümberdefineerimine, tootjavastutus või ka musta kasti võimaldatud tõendamisviis) ei puudata ainult isejuhtivaid sõidukeid, vaid samamoodi ka teiste robotite kasutamist, oleks kasulik lisada tsiviilvastutuse süsteemi uus suure ohu allikaid käsitlev üldnorm, mis võiks sarnaneda näiteks loomapidaja vastutusega. Sellise ettepaneku teeb ka 2017. aastal Riigikantselei poolt advokaadibüroolt Triniti tellitud „Analüüs SAE tase 4 ja 5 sõidukite kasutusele võtmiseks“18.
Selline üldnorm peaks olema kooskõlas Euroopa Komisjoni 2021. aasta aprillis tehisintellekti käsitleva õigusakti eelnõuga, mis jagab tehisintellektiga seotud riskid nelja kategooriasse: 1) vastuvõetamatud, 2) kõrged, 3) madalad ja 4) minimaalsed riskid, kehtestades tehisintellektisüsteemi pakkujale vastavad kohustused ja võimalikud sanktsioonid19. Triniti analüüs teeb lisaks ettepaneku, et roboti tegevuse osas tuleks määrata kindlaks tootjavastutuse piirangud, kuna tehisintellekti puhul olemasolevat tootjavastutust kohaldada ei saa.
Kokkuvõttes ei ole vaja suuri seadusandlikke jõupingutusi, et Eesti oleks valmis reguleerima 4.–5. taseme sõidukite vastutust, kuid nii sõidukijuhid kui ka tootjad ning ametiasutused vajavad õiguskindlust seoses uudsete tehniliste üksikasjade klassifitseerimisega: vaja on konkreetseid riskitasemete määratlusi (nt isejuhtiva sõiduki puhul võib juhtimisüssteem olla kõrge, aga juturoboti rakendus madala riskitasemega tehisintellektisüsteem), tehnilistele nõuetele vastavaid erandeid (nt operaator kui sõidukijuhi erandjuhtum) ning ühtset vastutusraamistikku (täiendades seega olemasolevat sõidukite vastutusraamistikku) tehisintellekti korral, mis võtaks arvesse viimase omadust olla suure ohu allikas.

Thomas Hoffmann on TalTechi eraõiguse professor.
Uuringud ja viidatud kirjandus:
- Accelerista, https://www.accelerista.com/uudis/innovatsioon/isejuhtiva-soiduki-tasemed/
- Saksa Patendi- ja Kaubamärgiamet, https://www.dpma.de/dpma/veroeffentlichungen/hintergrund/autonomesfahren-technikteil1/index.html
- Patrick Ayad/Susanne Schuster, Financier worldwide, https://www.financierworldwide.com/the-road-to-autonomous-vehicles-in-europe#.Yk2KHudBy70
- Euroopa Komision, määruse (EL) 2019/2144 rakenduseeskirjade eelnõu, https://circabc.europa.eu/sd/a/4664e8a3-0634-4430-8035-9fc07d99b2bf/Com%20Impl%20act%20AD%20V4.1.pdf?fbclid=IwAR2A3igB10GotAl4dOfaHYvkyH4gA_oVCUWIFUr4qb9biVBtL4wz3T6-me8; Saksamaa Liitvabariigi digitaal- ja transpordiministeerium, https://www.bmvi.de/SharedDocs/DE/Artikel/StV/Strassenverkehr/neue-fahrzeugsicherheitssysteme.html
- Seadus, millega muudetakse liiklusseadust ja kohustusliku kindlustuse seadust – autonoomse juhtimise seadus (19/27439), üksikasjad vt pressiteade Saksa Bundestag, https://www.bundestag.de/dokumente/textarchiv/2021/kw20-de-autonomes-fahren-840196
- Kaheksas liiklusseaduse muutmise seadus, Bundesgesetzblatt 2017, I osa, nr 38, välja antud 20.06.2017, lk 1648.
- IoT world today, https://www.iotworldtoday.com/2022/03/10/japan-is-one-step-closer-to-launching-driverless-vehicles/
- Times of Israel, https://www.timesofisrael.com/new-legislation-paves-path-for-trial-of-driverless-autonomous-taxis-in-israel/
- Reuters, https://www.reuters.com/business/autos-transportation/us-eliminates-human-controls-requirement-fully-automated-vehicles-2022-03-11/
- Eletrek, https://electrek.co/2022/03/04/the-top-five-best-equipped-countries-to-support-autonomous-vehicles-whos-leading-the-self-driving-revolution/)
- Majandus- ja kommunikatsiooniministeerium, https://www.mkm.ee/et/uudised/eesti-lubab-osad-isejuhtivad-autod-tanasest-tanavatele
- Autogeenius, https://auto.geenius.ee/rubriik/uudis/maanteeamet-on-teedele-lubanud-kaks-isejuhtivat-soidukit/
- TalTech, https://iseauto.taltech.ee/tehniline/
- Maanteeamet, Isejuhtivate sõidukite tehnoloogia teekaart, https://transpordiamet.ee/media/3296/download
- Vt selles osas peaaegu et identset Saksamaa õiguslikku olukorda: Reinhard Greger, Haftungsfragen beim automatisierten Fahren, Neue Zeitschrift für Verkehrsrecht 2018, 1–5.
- Vt selles osas peaaegu et identset Saksamaa õiguslikku olukorda: Bahran Roshan, Automatisiertes und autonomes Fahren im Überblick, Neue Juristische Wochenschrift-Spezial, 2021, 137–138.
- Nadezhda Purtova, The law of everything. Broad concept of personal data and future of EU data protection law, Law, Innovation and Technology, 10:1 (2018), 40–81.
- Maarja Pild, Karmen Turk, Triniti advokaadibüroo, https://triniti.ee/wp-content/uploads/sites/2/2017/10/L%C3%95PPRAPORT_Anal%C3%BC%C3%BCs-SAE-tase-4-ja-5-s%C3%B5idukite-kasutusele-v%C3%B5tmiseks_Riigikantselei_okt-2017.pdf
- Tehisintellekti käsitleva õigusakti eelnõu 2021/0106(COD), https://eur-lex.europa.eu/legal-content/ET/TXT/HTML/?uri=CELEX:52021PC0206&from=EN
Fotod ja videod: TuSimple.com, Unsplash.com, Auve Tech, TalTech
Veel Pikksilma artikleid
Tervise- ja heaolutehnoloogiad1 on muutunud inimkeskseks. See tähendab, et igaüks peab oma tervist ja elu puudutavaid valikuid tehes üha enam ise vastutust võtma ja initsiatiivi haarama. Uudsete tehnoloogiliste lahenduste kasutamine nõuab aga nii tervishoiutöötajalt kui ka tavainimeselt uusi pädevusi, lisaks tuleb tehnoloogia potentsiaali rakendamiseks esmalt lahendada rida valdkonnaspetsiifilisi probleeme. Muu hulgas tuleb tagada, et kõigil inimrühmadel oleks tervise- ja heaolutehnoloogiatele võrdne ligipääs ning oskused ja võimalused uudsete lahenduste kasutamiseks.

Eesti põllumajanduse tulevikku kujundavad rahvusvahelise kaubanduse reeglite ja võimaluste muutumine, vajadus kindlustada toidujulgeolek ning Euroopa Liidu ühise põllumajanduspoliitika (ÜPP) toetused ja piirangud, milles üha olulisemal kohal on kliima- ja keskkonnahoid. Täiendavalt mõjutab sektorit biotehnoloogia areng, mille viljadest osasaamine eeldab algatusvõimelist tegutsemist. Oluline on mõista, millised uued võimalused võivad nende tegurite koosmõjul kujuneda ning kuidas olla valmis neid võimalusi kasutama, kirjutab Tallinna Ülikooli emeriitprofessor ja projektijuht Erik Terk.

Vajaduspõhiste toetuste õiglasel määramisel on vaja usaldusväärseid leibkonnaandmeid, sest inimese toimetulek ei sõltu üksnes tema isiklikust sissetulekust, vaid ka leibkonna koosseisust ja ühiste ressursside jagamisest. Eestis puuduvad usaldusväärsed ja terviklikud leibkonnaandmed, mis takistab toetuste tõhusamat sihtimist. Appi saavad tulla privaatsust tagavad tehnoloogiad, kirjutavad Liina Kamm ja Dan Bogdanov ettevõttest Cybernetica.
Viimased uudised
-
21.06 2026Raport: Eestis võib tehisaru kasutus jääda pinnapealseks ega too oodatud tootlikkuse kasvu
Tehnoloogilised uuendused ja tehisaru mõjuvad ettevõtete tootlikkusele positiivselt vaid siis, kui muutuvad ka tööprotsessid ja juhtimine. Eesti riiklik eesmärk tõsta tootlikkus 110 protsendini Euroopa Liidu keskmisest eeldab lisaks ka töötajate sotsiaalsete ja koostööoskuste parandamist, toob Arenguseire Keskus välja värskes lühiraportis.